The overarching goal of diffusion models is to predict the noise that was added to an image at any time between and .
We want to add noise to the image such that the noisy image at is Gaussian, i.e. , which is required to create a learnable loss function and because standard Gaussians give us nice mathematical properties and, thus, are easy to work with.
Noise is added gradually, instead of one large addition of Gaussian noise. Just a bit in the beginning, then more towards the end when the image is almost fully Gaussian anyway. We do this, because we want to learn to undo the noise that was added between step and .
The reasoning is that it’s easier to learn to undo a bit of noise, rather than a lot of noise across many time steps.
Forward Process
In order to get the noisy images to train, we need to generate them. This is naive, flawed approach:
Here, is the Gaussian noise added at time .
The term is added to scale down the Gaussian noise. This is required, because the input images are often normalised, usually between 0 and 1. Standard Gaussian noise can return numbers like , which will quickly overwhelm the numbers of the input image. Therefore, the Gaussian noise needs to be scaled down.
With this current setup, we need to have the previous noisy image to generate the next noisy image . But we can rewrite this to get any just from the starting image . E.g.:
If you have zero mean, scaled Gaussians, you can sum the variances, which gives you a “new” Gaussian:
But unfortunately, because and .
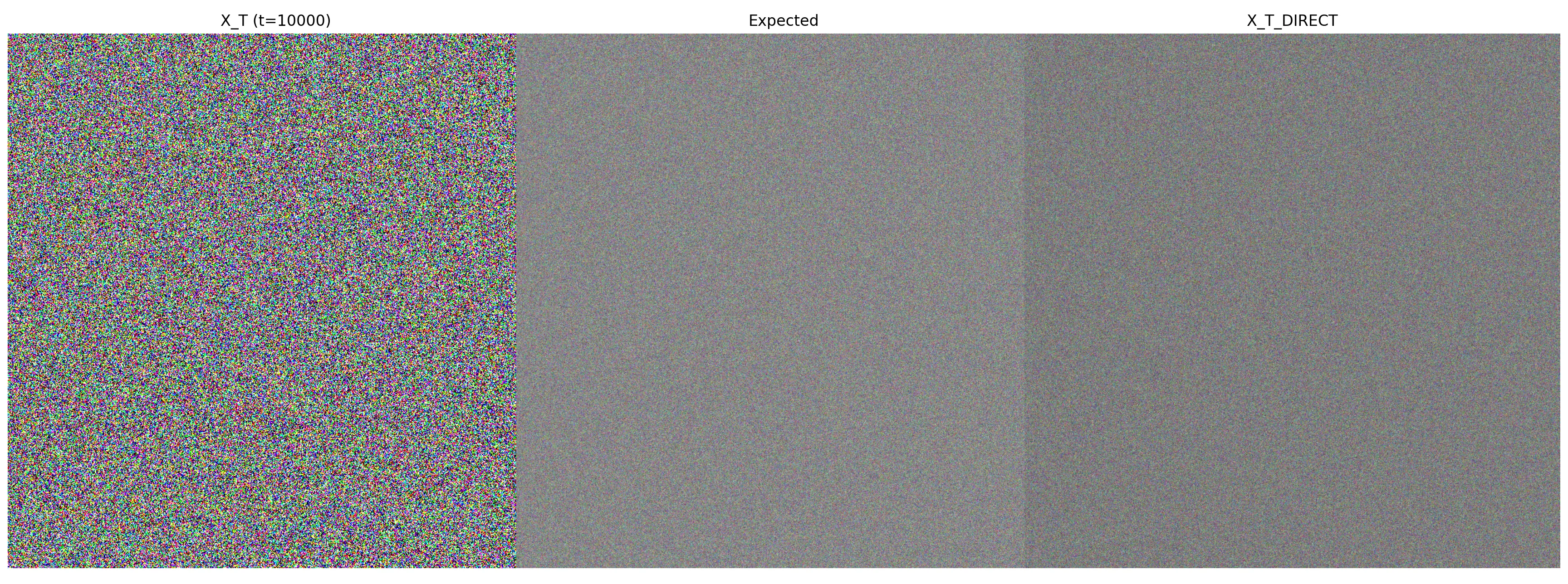
We can even see this visually if we add the noise to an image in this iterative way and compare this to what standard Gaussian noise would look like.
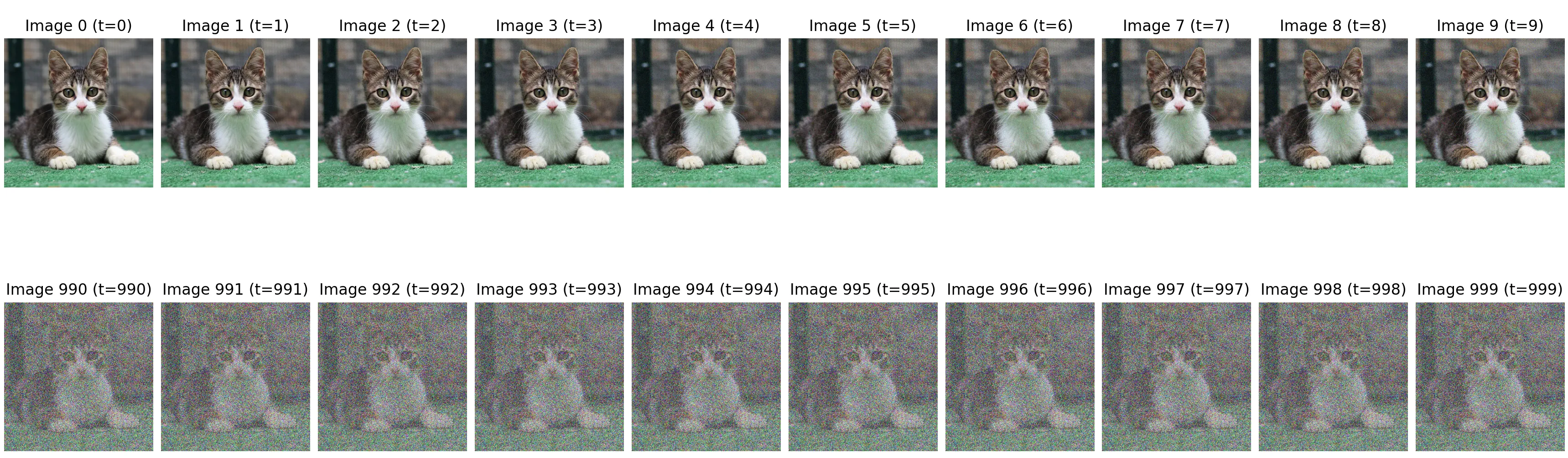
This is what the iterative approach would look like (which also takes a lot of time to run). Using the direct approach, we can get the final noisy image faster:
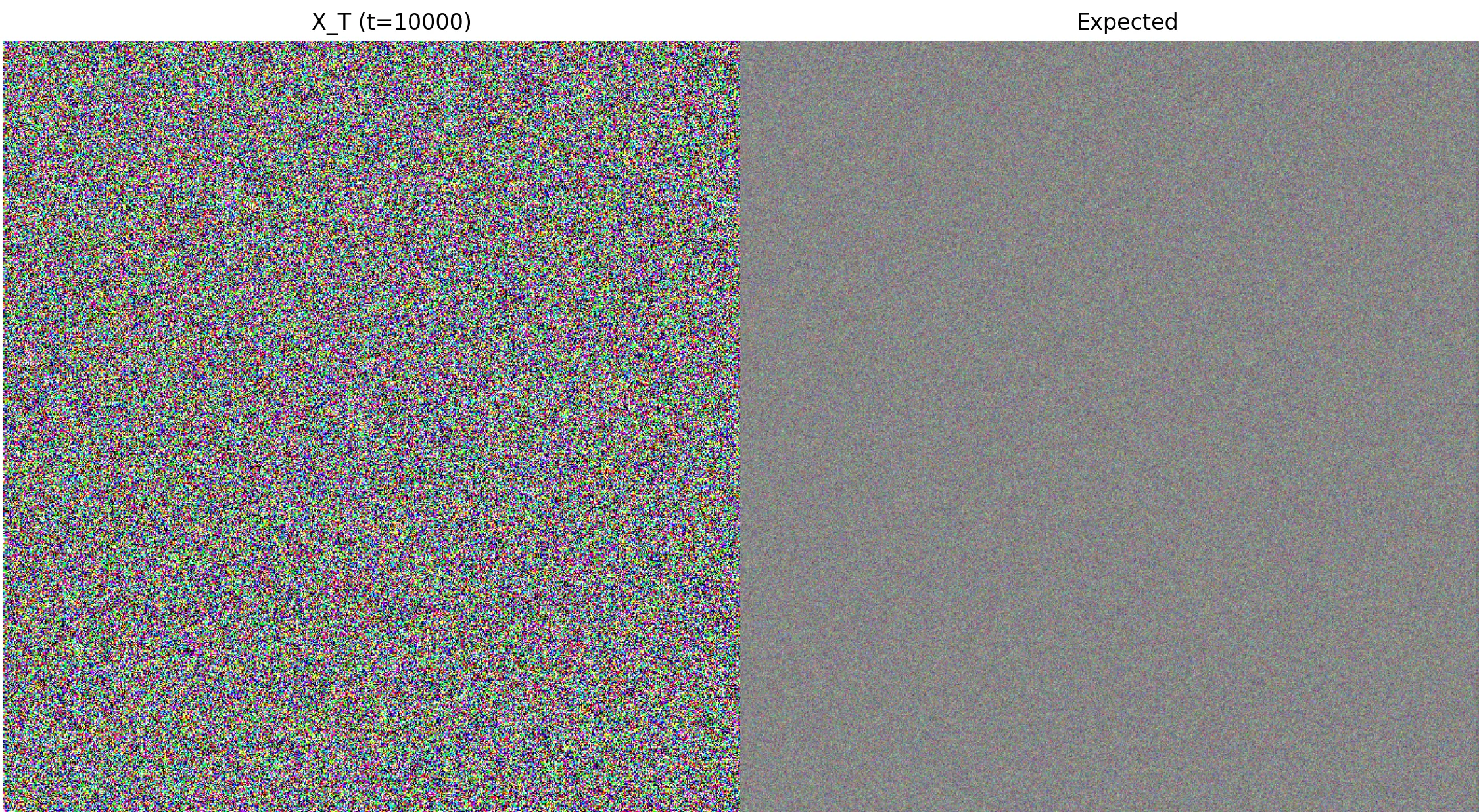
But as can be seen, the noisy image looks much different that what true Gaussian noise would look like. This further shows that our naive approach does not converge to a standard Gaussian.
A better approach is needed. The authors came up with this formula:
where is the scalar at time step (following a schedule e.g.). However, the issue still persists that we need to compute to compute . But we’d much rather have a function that takes the initial and as input at outputs the correct directly. Let’s have a look at what looks like.
If we substitute into the equation, we get
Now, we say that to make this easier to read and have less clutter:
Now we can re-use our neat trick from before where we said that variances of zero-mean Gaussians ( and in our case) can be summed up. Remember, that in this equation we are working with standard deviations (i.e. ) but variances are the squares of standard deviations (i.e. ). This means, we need to square our standard deviations to get the variance first, i.e.:
The variance of a Gaussian is 1, which gives us:
This means that if we sum up the variances, we get a new Gaussian with mean 0 and variance . In other words:
I denoted the new Gaussian noise as . From here, we can notice a pattern! We managed to describe as a combination from the noisy image two steps before and this has added another term into the square roots. If we repeat this process until we get to , we have this:
We can simplify this a bit further by saying , which gives us our final statement:
And there we go! Now we can generate the final noisy image at time step just by having the initial image . Using this new formula, we can compare the generated noisy image from what we had generated before:
Now this looks much closer to Gaussian noise than what we had before. It’s a bit darker due to the larger value for that I used. However, mathematically, this does converge to a standard Gaussian
Because as we increase , we keep multiplying more and more numbers that are between 0 and 1 (because remember that needs to be in that range), thus making the square root smaller and smaller, which in the limit becomes 0 and . Similarly, as time goes on and moves towards 0, the square root converges towards 1, which then just adds regular Gaussian noise via .
With this, we have the forward method covered. Now it’s time to derive the loss function and the learning objective.
Deriving the Loss Function
So far, we have described the forward process as a step-by-step sampling procedure. This is great for building intuition. However, to create a loss function, we need to shift from the language of single samples () to the language of probability distributions. This is important, because as we try to predict the noise added at a particular step , we don’t actually know exactly what noise has to be added in general. Think of it this way:
You have some and sample some noise to get , you add that in and then get . But this amount of noise and this specific are just some samples. There are many more and that could result in , it’s like a whole cloud. These specific values might have come from the edge of the cloud. If you just computed the MSE from that, you wouldn’t learn the true average, which you would find in the center of the cloud. By thinking about this as a probability distribution, you need to find the loss between your model and the center of the cloud.
The formal name for the distribution defined by our single-step sampling process is .
The Markov Chain Property
A crucial property of our forward process is that it’s a Markov Chain. This simply means that the distribution for the next state, , depends only on the immediately preceding state, . It does not depend on any other previous states like , , or the original .
The Joint Probability Distribution
We want to find the probability of an entire sequence of noisy images, , given our starting image . This is the joint probability distribution, .
Using the general chain rule of probability, we would write this as: This looks complicated because each step seems to depend on the entire history.
However, we can now apply our Markov assumption. The assumption that only depends on allows us to simplify each term:
- simplifies to just .
- simplifies to just . Applying this simplification across the entire chain gives us a much cleaner result: Finally, we can write this long product in a compact form using the product symbol, : This final equation is the formal definition of our entire forward process.
For the reverse process, we have our model . To get a clean image back, we have to compute the joint probability, i.e.:
From here we can start with the loss function derivation, because as stated before, we want to sample a clean image using our model. To do that, we need to minimise the negative log likelihood:
If we can minimise this, then we are learning the true data distribution, i.e. our dataset.
From here the first step is marginalisation using the Chain Rule of Probability:
This loss function is numerically intractable, because we can’t integrate over all possible in existence. We need to insert something into this intractable integral to make it tractable. We can use the “divide-by-one” trick (I’m not sure if that’s what it’s called - I just like to call it that):
Now, this is in the form of an expectation, i.e.:
Therefore, if we rewrite this into the form of an expectation, we get
I did this definition:
just so the math is a bit more concise.
Now we need to apply the logarithm:
Because is a concave function, we can apply Jensen’s Inequality, which states:
This gives us:
Now we have a lower bound. If we can make the expectation smaller, we will also minimise the negative log likelihood, which is exactly what we want. Thus, our new loss function to minimise is
We can apply this log rule to get rid of the negative sign .
Now, we can use this log rule
Because , we can turn the products into sums and remove the brackets of the left log part:
You will also notice that I separated the step. This is required in order to apply Bayes’ rule.
But if you instead did this:
You would get a so-called Dirac Delta function , which is a point mass “probability distribution” which in turn isn’t really a probability distribution, because there is no uncertainty. It’s like saying “What card do I hold on my hand given that I hold the ace of hearts?”. It’s a tautology. This means you can’t apply Bayes’ rule here in a matter that makes sense, therefore you exclude this part.
Now we can rewrite the fraction in the sum using Bayes’ Rule (and the log rule where a product becomes a sum).
What we have now is a so called telescoping sum, which comes from this part:
If you were to write out the terms you would get something like this (I will simplify this to just tuples, assume that the tuple (0,0) is equal to one, because ):
The tuples being placeholders, e.g. or etc. As you can see, all the pairs cancel out except for the last one. This simplifies the sum to be this:
Ok, so now we have 3 terms and whenever you see a log of a quotient, you have to think “KL Divergence”, which measures the distance between two probability distributions, i.e.:
Or for continuous probabilities:
Or if written in the form of an expectation:
This is exactly what we have in our loss term:
If we have a closer look, we can see that the left KL divergence has no trainable parameters in it, so we can safely ignore it, as it will become 0 as soon as we compute the gradient. As for the rightmost part, the authors of the DDPM paper have seen that, empirically, it makes no difference to leave that part it, so we can also leave that part out. This leaves us with this:
The good thing is that if your probability distributions are Gaussian, they simplify to a nice closed form. In general, for two univariate Gaussians, you have
and for multivariate Gaussians, you have this:
In the above formula, is the determinant, is the dimensionality and is the trace. Crucially, the authors set the covariances (variances) of both Gaussians to be equal, which means their determinants are also equal, which means two things:
First:
And second:
And therefore, you have this , which means that only the means survive:
Because we set the variance to a constant, is just a constant factor, which plays no role when we minimise the loss function, so we can leave it out, which finally brings us to this part:
There is one last step, which is the reparameterisation trick. This was our forward step:
Which we can solve for
The true posterior mean has this form:
If we substitute , we get:
Doing a bit of algebra and collecting the terms, we arrive at:
In this form, the true mean is now expressed as a combination of and the true noise . If we now change our neural network to output not the mean, but rather the noise directly, we get this:
If we insert this into the above loss expression, we get this:
Which finally brings us to
Code
Here’s the entire code for diffusion models. Afterwards, I will highlight a few important aspects.
from io import BytesIO
import equinox as eqx
import grain
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
import optax
from jaxtyping import Array, Float, Int, PRNGKeyArray
from PIL import Image
from tensorflow_datasets.core.file_adapters import pq
from tqdm import tqdm
from jaxonlayers.functions.embedding import sinusoidal_embedding
batch_size = 2
num_epochs = 20
class DataFrameDataSource:
def __init__(self, data_list: list[dict]):
self._data = data_list
def __len__(self) -> int:
return len(self._data)
def __getitem__(self, record_key: int) -> dict:
return self._data[record_key]
class MNISTPreprocessor(grain.transforms.Map):
def map(self, element):
image_dict = element["image"]
label = element["label"]
image_bytes = image_dict["bytes"]
pil_image = Image.open(BytesIO(image_bytes))
image_array = np.array(pil_image, dtype=np.float32)
image_array = image_array / 255.0
width, height = image_array.shape
image_array = image_array.reshape(1, width, height)
return {
"image": jnp.array(image_array),
"label": jnp.array(label, dtype=jnp.int32),
}
def load_mnist_from_hf(split="train"):
splits = {
"train": "mnist/train-00000-of-00001.parquet",
"test": "mnist/test-00000-of-00001.parquet",
}
url = "hf://datasets/ylecun/mnist/" + splits[split]
table = pq.read_table(url)
return table.to_pylist()
train_data = load_mnist_from_hf("train")
test_data = load_mnist_from_hf("test")
train_source = DataFrameDataSource(train_data)
test_source = DataFrameDataSource(test_data)
transformations = [MNISTPreprocessor(), grain.transforms.Batch(batch_size=batch_size)]
index_sampler = grain.samplers.IndexSampler(
num_records=len(train_source),
num_epochs=num_epochs,
shard_options=grain.sharding.ShardOptions(
shard_index=0, shard_count=1, drop_remainder=True
),
shuffle=True,
seed=0,
)
data_loader = grain.DataLoader(
data_source=train_source,
operations=transformations,
sampler=index_sampler,
worker_count=0,
)
class ConvBlock(eqx.Module):
time_mlp: eqx.nn.Linear
conv1: eqx.nn.Conv2d
conv2: eqx.nn.Conv2d
def __init__(
self,
in_channels: int,
out_channels: int,
time_embedding_size: int,
*,
key: PRNGKeyArray,
):
key1, key2, key3 = jax.random.split(key, 3)
self.time_mlp = eqx.nn.Linear(time_embedding_size, out_channels, key=key1)
self.conv1 = eqx.nn.Conv2d(
in_channels, out_channels, kernel_size=3, padding=1, key=key2
)
self.conv2 = eqx.nn.Conv2d(
out_channels, out_channels, kernel_size=3, padding=1, key=key3
)
def __call__(
self,
x: Float[Array, "channel width height"],
t: Float[Array, "time_embedding_size"],
) -> Float[Array, "channel width height"]:
h = self.conv1(x)
h = jax.nn.silu(h)
time_emb = self.time_mlp(t)
time_emb = jax.nn.silu(time_emb)
time_emb = time_emb[:, None, None]
h = h + time_emb
h = self.conv2(h)
h = jax.nn.silu(h)
return h
class DiffusionModel(eqx.Module):
time_mlp: eqx.nn.MLP
time_embedding_size: int
initial_conv: eqx.nn.Conv2d
down1: ConvBlock
down2: ConvBlock
pool: eqx.nn.MaxPool2d
bottleneck: ConvBlock
up1: eqx.nn.ConvTranspose2d
up_conv1: ConvBlock
up2: eqx.nn.ConvTranspose2d
up_conv2: ConvBlock
final_conv: eqx.nn.Conv2d
def __init__(self, time_embedding_size: int, *, key: PRNGKeyArray):
self.time_embedding_size = time_embedding_size
keys = jax.random.split(key, 10)
self.initial_conv = eqx.nn.Conv2d(1, 32, kernel_size=3, padding=1, key=keys[0])
self.down1 = ConvBlock(32, 64, time_embedding_size, key=keys[1])
self.down2 = ConvBlock(64, 128, time_embedding_size, key=keys[2])
self.pool = eqx.nn.MaxPool2d(kernel_size=2, stride=2)
self.bottleneck = ConvBlock(128, 256, time_embedding_size, key=keys[3])
self.up1 = eqx.nn.ConvTranspose2d(
256, 128, kernel_size=2, stride=2, key=keys[4]
)
self.up_conv1 = ConvBlock(256, 128, time_embedding_size, key=keys[5])
self.up2 = eqx.nn.ConvTranspose2d(128, 64, kernel_size=2, stride=2, key=keys[6])
self.up_conv2 = ConvBlock(128, 64, time_embedding_size, key=keys[7])
self.final_conv = eqx.nn.Conv2d(64, 1, kernel_size=1, key=keys[8])
self.time_mlp = eqx.nn.MLP(
in_size=time_embedding_size,
out_size=time_embedding_size,
width_size=time_embedding_size * 4,
depth=2,
key=keys[9],
)
def __call__(
self, x_t: Float[Array, "channel height width"], t: Int[Array, ""]
) -> Float[Array, "channel height width"]:
time_embeddings = sinusoidal_embedding(t, self.time_embedding_size)
time = self.time_mlp(time_embeddings)
h = self.initial_conv(x_t)
skip1 = self.down1(h, time)
h = self.pool(skip1)
skip2 = self.down2(h, time)
h = self.pool(skip2)
h = self.bottleneck(h, time)
h = self.up1(h)
h = jnp.concatenate([h, skip2], axis=0)
h = self.up_conv1(h, time)
h = self.up2(h)
h = jnp.concatenate([h, skip1], axis=0)
h = self.up_conv2(h, time)
output = self.final_conv(h)
return output
learning_rate = 1e-4
time_embedding_size = 64
timesteps = 400
def linear_beta_schedule(timesteps):
scale = 1000 / timesteps
beta_start = scale * 0.0001
beta_end = scale * 0.02
return jnp.linspace(beta_start, beta_end, timesteps)
betas = linear_beta_schedule(timesteps=timesteps)
alphas = 1.0 - betas
alpha_bars = jnp.cumprod(alphas, axis=0)
sqrt_alpha_bars = jnp.sqrt(alpha_bars)
sqrt_one_minus_alpha_bars = jnp.sqrt(1.0 - alpha_bars)
print(betas[0], betas[-1], betas.shape)
print(alphas[0], alphas[-1], alphas.shape)
print(alpha_bars[0], alpha_bars[-1], alpha_bars.shape)
print(sqrt_alpha_bars[0], sqrt_alpha_bars[-1], sqrt_alpha_bars.shape)
print(
sqrt_one_minus_alpha_bars[0],
sqrt_one_minus_alpha_bars[-1],
sqrt_one_minus_alpha_bars.shape,
)
def loss_fn(
model: DiffusionModel,
x_0_batch: Float[Array, "batch channel height width"],
key: PRNGKeyArray,
) -> Float[Array, ""]:
batch_size, *_ = x_0_batch.shape
keys = jax.random.split(key, batch_size)
def _create_x_t_batch(x_0, _key):
t_key, noise_key = jax.random.split(_key)
t = jax.random.randint(t_key, shape=(), minval=0, maxval=timesteps)
noise = jax.random.normal(noise_key, shape=x_0.shape)
sqrt_alpha_bar_t = sqrt_alpha_bars[t]
sqrt_one_minus_alpha_bar_t = sqrt_one_minus_alpha_bars[t]
x_t = sqrt_alpha_bar_t * x_0 + sqrt_one_minus_alpha_bar_t * noise
return x_t, noise, t
x_ts, noise, ts = eqx.filter_vmap(_create_x_t_batch)(x_0_batch, keys)
predicted_noise = eqx.filter_vmap(model)(x_ts, ts)
loss = jnp.mean((noise - predicted_noise) ** 2)
return loss
@eqx.filter_jit
def train_step(
model: DiffusionModel,
optimizer: optax.GradientTransformation,
opt_state: optax.OptState,
x_0_batch: Float[Array, "batch channel height width"],
key: PRNGKeyArray,
):
loss_value, grads = eqx.filter_value_and_grad(loss_fn)(model, x_0_batch, key)
updates, opt_state = optimizer.update(
grads, opt_state, eqx.filter(model, eqx.is_array)
)
model = eqx.apply_updates(model, updates)
return model, opt_state, loss_value
main_key = jax.random.key(42)
def train():
model_key, train_key = jax.random.split(main_key)
model = DiffusionModel(time_embedding_size, key=model_key)
optimizer = optax.adam(learning_rate)
opt_state = optimizer.init(eqx.filter(model, eqx.is_array))
for epoch in range(num_epochs):
step = 0
total_loss = 0
with tqdm(data_loader, unit="batch") as tepoch:
tepoch.set_description(f"Epoch {epoch + 1}")
for batch in tepoch:
x_0_batch = batch["image"]
train_key, step_key = jax.random.split(train_key)
model, opt_state, loss = train_step(
model, optimizer, opt_state, x_0_batch, step_key
)
total_loss += loss.item()
step += 1
if step % 10 == 0:
avg_loss = total_loss / 100
tepoch.set_postfix(loss=avg_loss)
total_loss = 0
def generate_images_with_steps(
model: DiffusionModel, num_images: int, key: PRNGKeyArray, save_every: int = 10
):
generated_images = []
all_steps = []
keys = jax.random.split(key, num_images)
for i in range(num_images):
x_t = jax.random.normal(keys[i], shape=(1, 28, 28))
steps = []
for t in range(timesteps - 1, -1, -1):
if t % save_every == 0 or t == 0:
steps.append(x_t.copy())
predicted_noise = model(x_t, jnp.array(t))
alpha_t = alphas[t]
alpha_bar_t = alpha_bars[t]
beta_t = betas[t]
mean = (1.0 / jnp.sqrt(alpha_t)) * (
x_t - (beta_t / jnp.sqrt(1.0 - alpha_bar_t)) * predicted_noise
)
if t > 0:
noise_key = jax.random.fold_in(keys[i], t)
noise = jax.random.normal(noise_key, shape=x_t.shape)
x_t = mean + jnp.sqrt(beta_t) * noise
else:
x_t = mean
generated_images.append(x_t)
all_steps.append(steps)
return generated_images, all_steps
def generate(model):
num_generated_images = 3
generation_key = jax.random.split(main_key, 1)[0]
generated_images, all_steps = generate_images_with_steps(
model, num_generated_images, generation_key, save_every=10
)
for img_idx in range(num_generated_images):
steps = all_steps[img_idx]
num_steps = len(steps)
fig, axes = plt.subplots(1, num_steps, figsize=(num_steps * 2, 2))
for step_idx, step_img in enumerate(steps):
display_img = np.clip(step_img[0], 0, 1)
axes[step_idx].imshow(display_img, cmap="gray")
timestep = (num_steps - step_idx - 1) * 10
axes[step_idx].set_title(f"t={timestep}")
axes[step_idx].axis("off")
plt.tight_layout()
plt.show()Important Bits
First, the code and the math are pretty close together (one of the rare occasions in ML). Look at the loss function:
def loss_fn(
model: DiffusionModel,
x_0_batch: Float[Array, "batch channel height width"],
key: PRNGKeyArray,
) -> Float[Array, ""]:
batch_size, *_ = x_0_batch.shape
keys = jax.random.split(key, batch_size)
def _create_x_t_batch(x_0, _key):
t_key, noise_key = jax.random.split(_key)
t = jax.random.randint(t_key, shape=(), minval=0, maxval=timesteps)
noise = jax.random.normal(noise_key, shape=x_0.shape)
sqrt_alpha_bar_t = sqrt_alpha_bars[t]
sqrt_one_minus_alpha_bar_t = sqrt_one_minus_alpha_bars[t]
x_t = sqrt_alpha_bar_t * x_0 + sqrt_one_minus_alpha_bar_t * noise
return x_t, noise, t
x_ts, noise, ts = eqx.filter_vmap(_create_x_t_batch)(x_0_batch, keys)
predicted_noise = eqx.filter_vmap(model)(x_ts, ts)
loss = jnp.mean((noise - predicted_noise) ** 2)
return lossEspecially this part should be very familiar to you:
x_t = sqrt_alpha_bar_t * x_0 + sqrt_one_minus_alpha_bar_t * noiseThis is exactly how we generated the noisy image from . The objective of this loss function is to predict ALL the noise that was added to in order to get . This is important to know to understand the image generation step:
for i in range(num_images):
x_t = jax.random.normal(keys[i], shape=(1, 28, 28))
steps = []
for t in range(timesteps - 1, -1, -1):
if t % save_every == 0 or t == 0:
steps.append(x_t.copy())
predicted_noise = model(x_t, jnp.array(t))
alpha_t = alphas[t]
alpha_bar_t = alpha_bars[t]
beta_t = betas[t]
mean = (1.0 / jnp.sqrt(alpha_t)) * (
x_t - (beta_t / jnp.sqrt(1.0 - alpha_bar_t)) * predicted_noise
)
if t > 0:
noise_key = jax.random.fold_in(keys[i], t)
noise = jax.random.normal(noise_key, shape=x_t.shape)
x_t = mean + jnp.sqrt(beta_t) * noise
else:
x_t = meanLook specifically at this part:
mean = (1.0 / jnp.sqrt(alpha_t)) * (
x_t - (beta_t / jnp.sqrt(1.0 - alpha_bar_t)) * predicted_noise
)
if t > 0:
noise_key = jax.random.fold_in(keys[i], t)
noise = jax.random.normal(noise_key, shape=x_t.shape)
x_t = mean + jnp.sqrt(beta_t) * noise
else:
x_t = meanThis might seem counterintuitive to you, after all, I told you that the reverse process is to subtract the bit of noise that was added to , so why do we:
- compute some mean?
- add noise ??
The reason is because of what our model predicts. Remember that our model predicts ALL the noise. If we simply did this
x_t = x_t+1 - predicted_noise // wrong!We wouldn’t actually get , but rather we would be jumping from directly to . So instead, we need to only remove a tiny bit of the predicted noise, not everything at once.
Furthermore, we are working with probabilistic models here and if we simply removed the noise directly (without adding in a tiny bit of variance), then we would too quickly collapse to the mean. We need to respect the variance as well.
There is a whole 3 day workshop worth of math hidden behind this bit:
mean = (1.0 / jnp.sqrt(alpha_t)) * (
x_t - (beta_t / jnp.sqrt(1.0 - alpha_bar_t)) * predicted_noise
)
if t > 0:
noise_key = jax.random.fold_in(keys[i], t)
noise = jax.random.normal(noise_key, shape=x_t.shape)
x_t = mean + jnp.sqrt(beta_t) * noise
else:
x_t = meanWhich includes tedious algebra using Bayes’ rule. To be honest, I haven’t gotten around to REALLY understanding all that, so you’ll have to excuse me for not deriving it here :(
For now, I think this is enough on Diffusion models. See you in the next one :)